
El US Army está probando en el campo un controlador universal de UGVs, tan versátil que podría conducir incluso carros de combate.

Si bien el sector privado lucha por perfeccionar automóviles autónomos que puedan operar de manera segura en carreteras bien mapeadas y bien mantenidas, el Ground Vehicle Systems Center (GVSC) del US Army ha desarrollado un conjunto estándar de software y sensores que pueden convertir en UGVs todo tipo de vehículos terrestres para uso militar, ya sean vehículos con ruedas o vehículos con orugas.

En palabras de Bernard Theisen, ingeniero senior del GVSC, "vamos a asumir que no hay comunicaciones, posiblemente no hay GPS, y el camino que estaba ayer, puede no estar allí hoy. Un camino de tierra puede ser arrastrado por una inundación en una operación de socorro en casos de desastre, por ejemplo, o cubierto por bombas en una zona de guerra. Y eso asumiendo que alguna vez hubo un camino, lo cual nunca una es algo seguro en el campo de batalla. En este caso lo que estamos buscando es aprovechar la innovación civil siempre que sea posible. La industria automotriz ha invertido miles de millones en automóviles autónomos y ha generado una gran cantidad de tecnología que el Ejército puede adoptar y adaptar para sus propósitos, desde algoritmos para evitar colisiones hasta sensores miniaturizados."

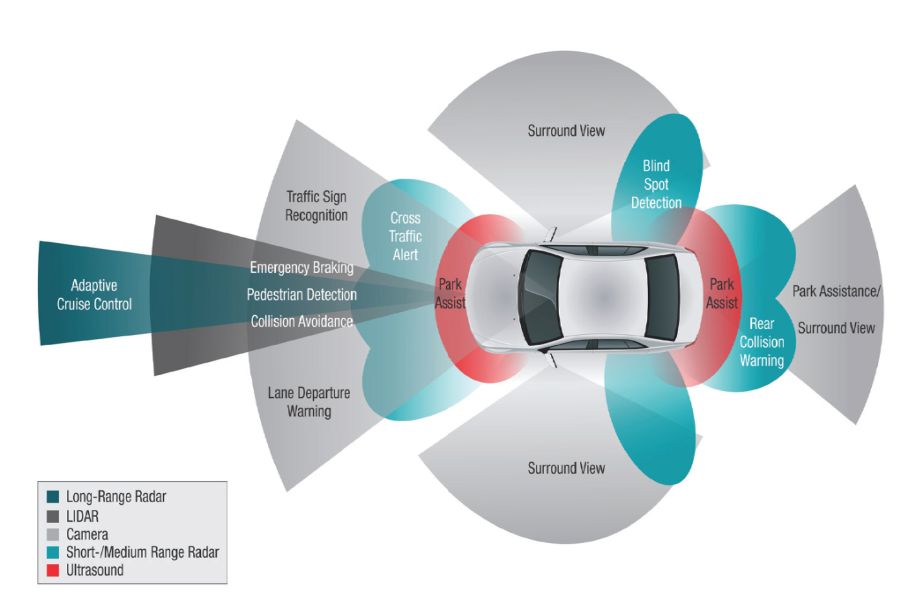
Pero los vehículos civiles, ya sean verdaderamente autónomos o simplemente equipados con funciones de advertencia para el conductor, como la advertencia de cambio de carril, se basan en la existencia de carriles marcados, pavimentos o bordillos, así como el acceso al GPS y las aplicaciones de mapeo. Por el contrario, un vehículo militar, ya sea un camión de suministros o un carro de combate, puede que ni siquiera tenga un mapa en el que confiar. Ante esta realidad, el software que el GVSC ha desarrollado incluye un modo de exploración en el que el vehículo comienza sin datos de mapas y va explorando con precaución el área al objeto de construir su propio mapa, sin la participación de un ser humano. Este modo no está habilitado en todos los vehículos, pero se muestra prometedor en los experimentos: "En este momento, no estamos dando a los sistemas muchos datos a priori. Básicamente les estamos dejando descubrir su entorno por su cuenta, porque asumimos que podríamos no tener GPS”, afirma Theisen. "La idea es dejar un UGV en el medio de la nada sin información, y que comience a construir su propio mapa. Más aún, hemos realizado pruebas en los que un UGV explora el área y comparte sus datos de mapas con otros, pues ofrece un potencial a largo plazo para liberar un enjambre de UGVs exploradores que mapean cuidadosamente las carreteras, callejones, incluso interiores y túneles subterráneos, antes de que las tropas humanas tengan que meterse en zonas de emboscada."

Niveles de autonomía
El modo exploratorio / de mapeo cuenta con el nivel de autonomía más elevado, mientras que el resto de los modos requieren algún nivel de supervisión humana. Vamos a verlos a continuación.

Modo "Advertencia del conductor": Este modo se encuentra hoy día en muchos automóviles civiles. Básicamente, un humano está al control del vehículo, pero el ordenador interpreta los datos proporcionados por los sensores montados alrededor del vehículo y advierte al humano cuando está a punto de golpear algo. Esto es particularmente útil para conducir camiones de suministro, carretillas elevadoras y vehículos con orugas.
Modo "Asistencia al conductor": En este modo el ordenador puede tomar el control del vehículo, temporalmente, cuando se detecta un impacto inminente. Una vez más, esta es una característica que también se encuentra en muchos vehículos civiles, pero es particularmente atractiva para el campo de batalla, donde el conductor puede sufrir con frecuencia un déficit de horas de sueño, más aún si se necesita conducir en la oscuridad, o transportar vehículos de varias toneladas llenos de combustible y explosivos.

Modo "Teleoperación": Esencialmente, es un modo de control remoto donde un humano controla el vehículo pero no está físicamente dentro de él. En su lugar, el humano se encuentra en un centro de control terrestre donde recibe los datos provenientes de los distintos sensores con los que cuenta el UGV y envía comandos a través de un enlace inalámbrico. Ese enlace puede ser desde una señal de radio con un alcance de unos pocos kilómetros, hasta un enlace satelital. Ahora bien, dado que mirar las pantallas no ofrece tanta información sensorial como estar físicamente en un vehículo, y que el retraso o interrupción de las transmisiones puede ralentizar las reacciones, la teleoperación funciona mejor con los modos "Advertencia" y "Asistencia" habilitados.

Modo "Líder-seguidor": Primero, un controlador humano selecciona vehículos para formar un convoy: los vehículos designados pueden maniobrar fuera de sus espacios de estacionamiento y alinearse en una columna u otra formación por su cuenta. Después, el humano designa un vehículo líder al que da órdenes ya sea entrando físicamente y conduciendo, o teleoperando por control remoto, o incluso dándole puntos de ruta para que lo sigan de manera autónoma. Si el convoy se encuentra con un obstáculo, el controlador humano puede ordenar que toda la formación retroceda, retrocediendo con precisión en sus propias huellas de neumáticos, o hacer que todos giren en U (de forma autónoma) y sigan como líder a otro vehículo.
El vehículo se vuelve realmente autónomo cuando utiliza la navegación por puntos de referencia. En este modo, un ser humano establece el destino y también puede agregar puntos intermedios a lo largo de la ruta. El ordenador calcula su propia ruta de un punto a otro, y conduce el vehículo a lo largo de esa ruta, evitando zonas prohibidas previamente designadas, maniobrando alrededor de obstáculos inesperados e incluso probando rutas alternativas en caso necesario. En el campo de batalla, este modo de conducción podría ser especialmente útil para enviar un camión por una ruta de suministro segura, enviar un vehículo dañado a un punto de reparación, o transportar soldados heridos a una estación de ayuda cuando no haya tropas aptas para llevarlos de regreso.
Adaptación del Hardware y del Software
Casi cualquier cosa con ruedas o orugas puede ser adaptada para convertirse en UGV gracias al software creado por el GVSC. Ahora bien, cada vehículo requiere algunas conexiones de hardware únicas para permitir que el ordenador controle el vehículo. Esto implica instalar lo que se conoce como "electrónica de accionamiento por cable" en lugar de utilizar controles mecánicos e hidráulicos tradicionales. Además de esto, cada misión puede requerir diferentes tipos de sensores instalados en diferentes ubicaciones para garantizar una cobertura 360. En cuanto al software, se ejecuta el mismo software en todos los vehículos. Lo único que cambia es el tipo de sensores que mandan información al ordenador, pero en esencia se utilizan los mismos procesadores y los mismos algoritmos. En definitiva, se trata de lograr un sistema de control que sea universal.
No hay comentarios:
Publicar un comentario
Nota: solo los miembros de este blog pueden publicar comentarios.